




O par de engrenagens composto por rosca sem-fim e engrenagem helicoidal de perfil evolvente tem sido amplamente utilizado em transmissões de baixa potência. Esse tipo de par de engrenagens é relativamente fácil de projetar e produzir. Na produção, se a precisão das peças for ligeiramente inferior ou se os requisitos de relação de transmissão não forem muito rigorosos, também é uma boa opção.
Atualmente, esse tipo de par de transmissão não está incluído nos dados gerais de projeto porque sua teoria ainda não está totalmente desenvolvida.
Esse tipo de par de engrenagens é um típico par de transmissão por contato pontual. Do ponto de vista microscópico, a tensão local é grande e a eficiência é baixa. Felizmente, o torque de transmissão é pequeno e os requisitos de eficiência são baixos. Portanto, é bastante comercializável. Tal projeto evita vários problemas existentes na fabricação e montagem de engrenagens helicoidais.
Este artigo discute principalmente a representação desse tipo de par de contato movendo-se ao longo da direção normal em um alcance muito pequeno, utilizando uma animação na direção do movimento do ponto de contato.
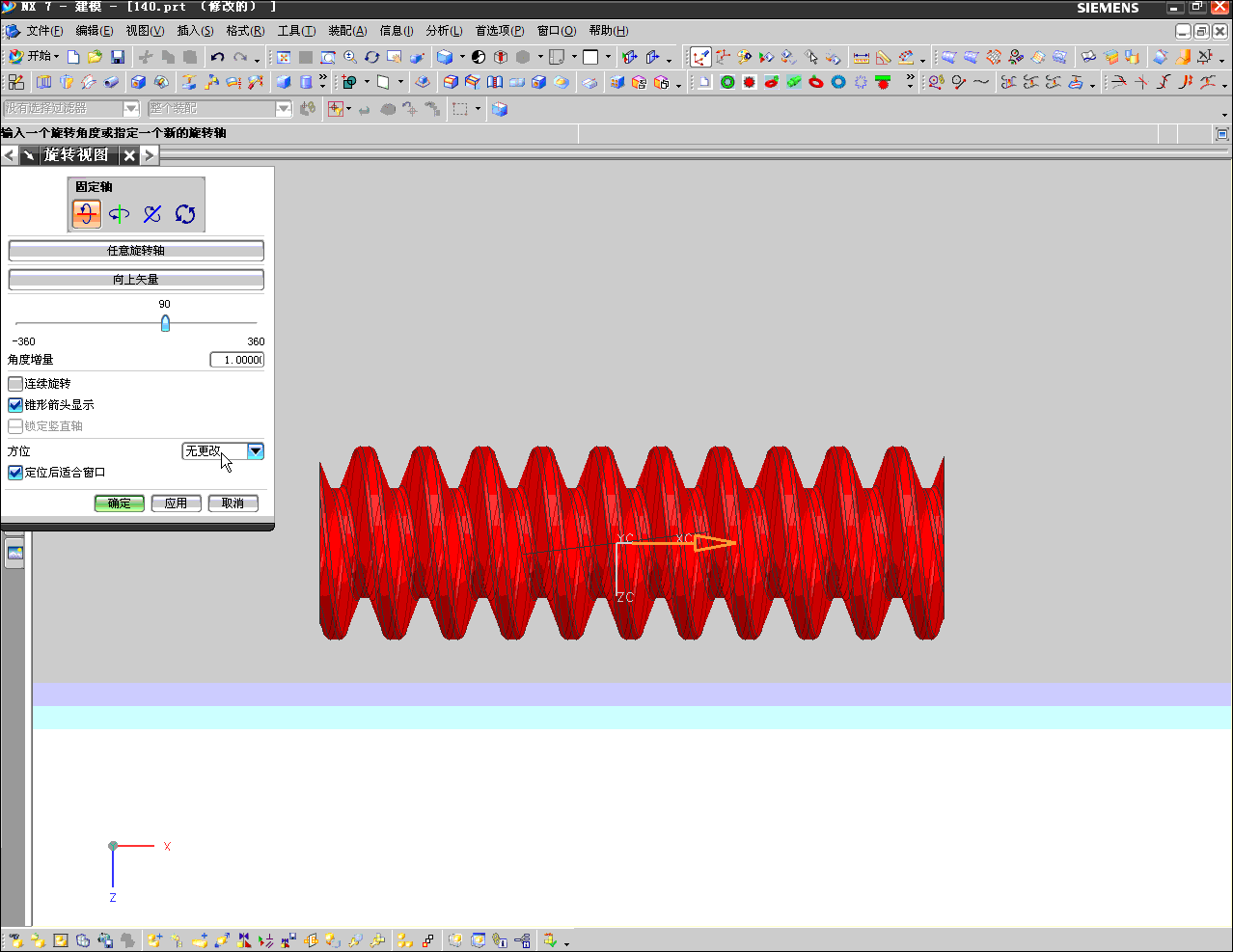
Crie um plano na seção central do par de engrenagens no desenho e processe-o em cores translúcidas e contrastantes no desenho. Em seguida, faça com que ele gire um ângulo ascendente em torno da linha vertical do centro da engrenagem até o sem-fim, que está localizado na posição do plano normal, conforme mostrado na figura a seguir:
Após o tratamento, selecione o par de transmissão que precisa ser verificado quanto às marcas de engrenamento, deixando um deles translúcido, para que o movimento da posição da malha durante todo o processo de simulação dinâmica possa ser visualizado claramente. Como mostrado abaixo:
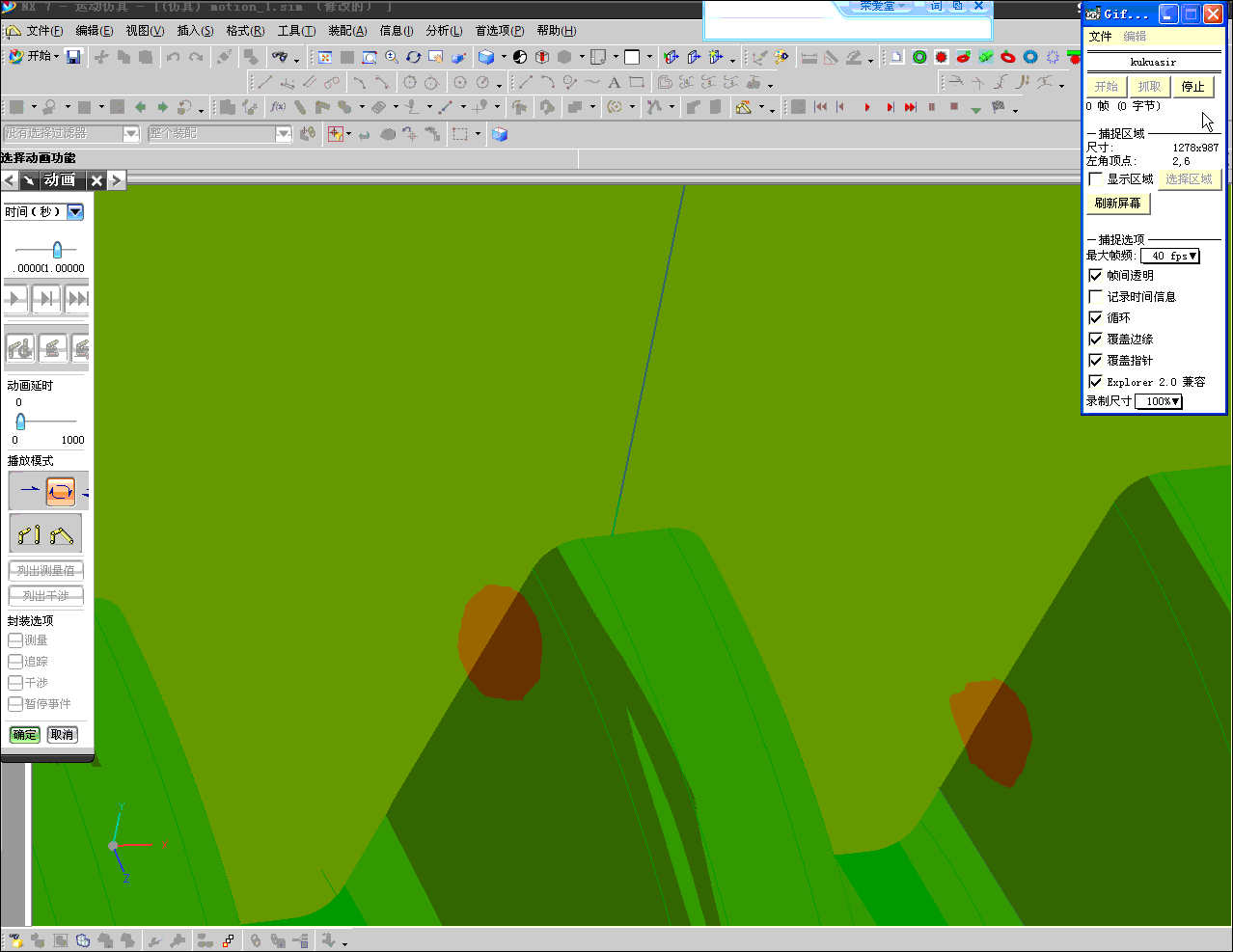
Durante o movimento do ponto de contato da malha, com cor de contraste evidente, pode-se observar que ele atravessa a folha normal.
Registros calculados no exemplo acima:
Registro de cálculo preliminar de um parafuso sem-fim involuto com engrenagem helicoidal
dados de entrada
Módulo normal: 6; diâmetro do círculo de indexação do sem-fim: 5; número de cabeças do sem-fim: 1; número de dentes da engrenagem helicoidal: 40
Ângulo de pressão normal: 20; ângulo da hélice de pré-seleção da engrenagem helicoidal: 6,89210257934639
Dados de cálculo
Módulo normal: seis
Módulo axial: seiscentos e quatro trilhões, trezentos e sessenta e sete bilhões, duzentos e vinte e três milhões, dezenove mil e trinta e cinco
Ângulo de subida da rosca: 6,89210257934639
Sentido da espiral: o parafuso sem-fim e a engrenagem helicoidal estão no mesmo sentido.
Distância do centro de deslocamento zero: 14,5873444603807
Distância entre os centros do par de transmissão de entrada: 14,75
Número equivalente de dentes do parafuso: 8,27311576399391
Ângulo de pressão axial do parafuso sem-fim: 20,1339195068419
Coeficiente de deflexão radial da engrenagem helicoidal: dois mil setecentos e onze
Ângulo da hélice do verme: 83,1078974206537
Parâmetros básicos do worm 83.10789742065361
Diâmetro maior do verme: 6,2 mm; diâmetro menor do verme: 3,5 mm; número de dentes do verme: 1
Módulo normal da rosca sem-fim: 6; ângulo de pressão normal da rosca sem-fim: 20; diâmetro do círculo de indexação da rosca sem-fim: 5
Coeficiente de deslocamento radial da rosca sem-fim: 0; diâmetro do círculo da base da rosca sem-fim: 1,56559093858108
Módulo final do verme: 5 Módulo axial do verme: seiscentos e quatro trilhões e trezentos e sessenta e sete bilhões duzentos e vinte e três milhões dezenove mil e trinta e cinco
Ângulo de pressão axial da rosca sem-fim: 20,1339195068419; ângulo de pressão na face final da rosca sem-fim: 71,752752179164
Espessura normal do dente do círculo de indexação da minhoca: 942477796076937; altura do dente do círculo de indexação da minhoca: seis
Ângulo ascendente da rosca do círculo de indexação da rosca sem-fim: 6,89210257934639; ângulo da hélice do círculo de indexação da rosca sem-fim: 83,1078974206537
Comprimento efetivo dos dentes do verme: 25
Passo axial (sem-fim): 1,89867562790706
Parâmetros básicos da engrenagem helicoidal
Diâmetro maior da engrenagem helicoidal: 25,7 mm; diâmetro menor da engrenagem helicoidal: 23 mm; número de dentes da engrenagem helicoidal: 40 mm
Módulo normal da engrenagem helicoidal: 6; ângulo de pressão normal da engrenagem helicoidal: 20; coeficiente de modificação da engrenagem helicoidal: 2.711.
Diâmetro do círculo de indexação da engrenagem helicoidal: 24,1746889207614; diâmetro do círculo base da engrenagem helicoidal: 22,69738911811
Módulo da face final da engrenagem helicoidal: 604367223019035; ângulo de pressão da face final da engrenagem helicoidal: 20,1339195068419
Ângulo helicoidal do círculo de indexação da engrenagem helicoidal: 6,89210257934639; largura da engrenagem helicoidal: 10
Passo da engrenagem helicoidal (axial): 628,318530717958
Número de dentes na linha normal comum da engrenagem helicoidal: 5; valor nominal da linha normal comum da engrenagem helicoidal: 8,42519
Número de dentes na linha normal comum da engrenagem helicoidal: 6; valor nominal da linha normal comum da engrenagem helicoidal: 10,19647
Diagrama de linha involuta da face final usado para modelar uma espiral involuta:
Data da publicação: 11 de junho de 2022